RAS Vessels, sites, and experiments
Autonomous Vessel Fleet
RAS is involved in research involving groups of small-scale autonomous ships (swarms, vessel trains, multi-vessel systems), as well as large-scale real-life vessels interacting with waterway infrastructure. The RAS itself owns a family of over 15 high-tech autonomous ships that are used for research and education purposes. The ships have different sensors and hardware configurations, making them suitable for carrying out experiments for a whole range of scenarios: from dynamic positioning subject to environmental disturbances, to complex multi-vessel and obstacle avoidance manoeuvrers. Several of the ships can be used both in the indoor and outdoor test sites of the RAS. Together with partners the RAS works on autonomy for larger scale and real-life size vessels.
 |
 |
 |
 (GEOxyz, INTERREG ISHY partner) |
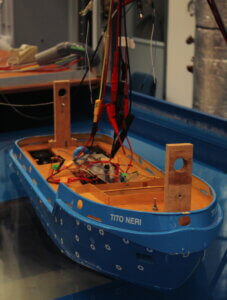
Tito Neri
The Tito Neri ship is a model scale ship of 1.45 meters wide and 16kg. It has a mono hull and it is equipped with sensors like accelerometers, encoders, distance measurement sensors, gyro and GPS. It has an ARM Cortex 32-bit CPU hardware and uses wireless network connection for communication.
Grey Seabax
The Grey Seabax ship is a model scale ship of 1.75 meters wide and 19kg. It has a mono hull and it is equipped with sensors like sensors like accelerometers, encoders, distance measurement sensors, gyro, GPS and it also has a camera attached to it. It has an ARM Cortex 32-bit CPU hardware and uses wireless network connection for communication.
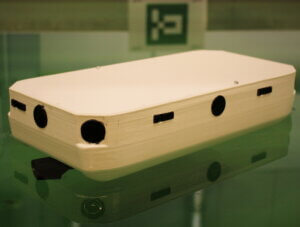
Delfia 1*
Delfia 1* is a ship of 45 cm wide, weighing 5kg. It has a catamaran body and it is equipped with sensors like LiDar, accelerometers, encoders, distance measurement sensors, gyro, GPS and it also has a camera attached to it. It has an ARM Cortex 32-bit CPU hardware and uses wireless network connection for communication. RAS has designed and build this type of vessel in-house and currently owns about 10 of these ships. Delfia 1* has been used in research on multi-agent control for autonomous ships.
Experiment sites
RAS works in cooperation with partners on experiments on waterborne autonomy in port, ocean going, and inland waterway areas across Europe. At the TUDelft campus, RAS carries out experiments in indoor and outdoor facilities such as towing tanks, flume tanks, Lake 3mE, The Green Village, and the nearby waterways of the municipality of Delft. Each of these sites has its own environmental and traffic-related characteristics.
 |
 |
 |
|
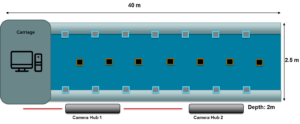
Towing tanks
The RAS has two towing tanks, out of which one towing tank has the dimensions of 142.00m in length, 4.22m in width and has a maximum water depth of 2.50m. It is fitted with motors and drive system with laser aided positioning and has a maximum carriage speed of 3.0m/s. Regular and irregular waves can be simulated using a flap type or electronic/hydraulic wavemakers in wavelengths of the range 0.30-6.00m. The second towing tank has the dimensions of 85.00 m in length, 2.75m in width and has a maximum water depth of 1.25 m. The carriage is motor driven and it has a maximum carriage speed of 3.00 m/s. Like the first towing tank waves can be simulated in the second towing tank too with wavelengths in the range of 0.40-6.50m, regular and irregular waves. In addition to this, both the towing tanks are equipped with highly accurate Motion Capture Cameras with millimeter feedback position accuracy and has an update frequency of 160Hz. These cameras could be highly beneficial for performing various tests in which the vessels’ position needs to be tracked in real time for example a path planning test or collision avoidance tests.
Several tests can be performed using the towing tanks and some them include
- Resistance in calm water and waves
- Motions and accelerations of fast ships in waves
- Open water propeller tests
- PAM-test on floating and submerged bodies or foils
- Forced oscillations in six degrees of freedom
- Wave induced motions and loads on ships and floating and moored structures
- Slamming phenomena
Flume tanks
The flume tanks are water tanks built inside the RAS lab. They are in the dimensions of 3 m in length and 2 m in width. Various real-life experiments can be performed in the flume tanks on model scale ships including dynamic position tests.
Lake 3mE
The lake outside the 3mE building of TU Delft is a place that is used for testing autonomous ships or remotely controlled ships in an unknown and unpredictable environment. This will be useful in testing the ships models in different wind speeds and weather conditions.
The Green Village
The Green Village is an environment in which innovations can be tested and demonstrated in real urban scenarios. The area is exempted from certain legislation, which means there is greater scope for experiments. The RAS is a natural navigational environment with monitoring systems, in which research involving autonomous navigation, and the necessary protocols, can be carried out safely. The main accent lies on researching how individual smart ships can operate optimally in environments with other waterway traffic (autonomous and non-autonomous alike) and obstacles.
‘DE NIEUWE HAVEN’ INLAND PORT IN DELFT (UNDER DEVELOPMENT)
As well as the environment at The Green Village, the possibilities for making the ‘De Nieuwe Haven’ inland port in Delft suitable for research testing are being investigated.
FIELD LAB ENVIRONMENTS (UNDER DEVELOPMENT)
The ‘radical automated navigation’ policy was adopted on 1 October. This gives the market greater scope to carry out tests involving automatic ships. In the product development and large-scale market introduction chain, this is a significant step. It allows the market to carry out tests in field lab environments.
Types of experiments
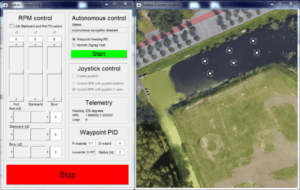
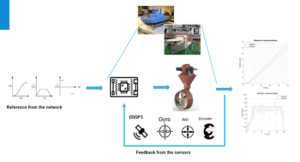
RAS has experience with carrying out control system analysis with analytical models, detailed simulation models, and actual experimental validation. The RAS is a dedicated lab facility that can conduct dry runs and validate control system software components. The autonomous vessel technology of the lab adopts a ROS framework for efficient monitoring and communication. New algorithms that are designed for implementing smart control system on the ships can be evaluated in the lab using hardware, software, and human in-the-loop experiments. In this way, the impact of different levels of autonomy can be evaluated.
 |
 |